Következő: A hideg légpárna Fel: Címlap Előző: A CHAPEAU és a WRF ... Tartalomjegyzék
Munkám során megvizsgáltam, hogyan hat az inicializáció a modellek produktumaira. Ahhoz, hogy az eredmények érthetőek legyenek, néhány szót kell ejtenem az inicializációról.
A 3. fejezetben olvasható, hogy a modelleknek bemenő adatokra van szükségük ahhoz, hogy a HTE-t megoldják. Ezek lehetnek mérési adatok, vagy egy korábbi modellfutás eredményei. Az a folyamat, melynek során mérési adatokból a modell bemenő adatait előállítjuk, az adatasszimiláció. A mérések olyan jelenségeket, hullámokat is tartalmazhatnak, melyeket a modell - egyszerűsítései vagy felbontása miatt - nem tud leírni. Például egy Δx horizontális felbontású rácson egy 2Δx-nél kisebb hullámhosszú hullám, vagy egy hidrosztatikus modellben minden olyan jelenség, ami nem hidrosztatikus és nincs parametrizálva. Ez kiegyensúlyozatlanságot okoz a kezdeti (pl. szél- és nyomás) mezőben, ami elronthatja az előrejelzést.
Munkám során - habár a modellek alkalmasak rá - nem történt adatasszimiláció, a kezdeti mezőket globális modellek szolgáltatták (3. táblázat). Ha a kezdeti mező nincs egyensúlyban, de a modell stabil numerikus sémát használ, a modell által nem leírt nagyfrekvenciás hullámok amplitúdója csökken, az egyensúly egy idő után beáll (szelektív csillapítás [7, 195. oldal]). Tehát a CHAPEAU és a WRF kezdeti mezői a globális modellek rácsán egyensúlyban vannak. Viszont az eredeti (pl. 16 km-es felbontású) rácsról az aktuális modell (pl. 7 km-es) rácsára történő interpoláció kiegyensúlyozatlanságot okoz. Ugyanis az eredeti térskála alatti hullámok matematikai művelet eredményei: a fizikai törvényszerűségeknek nem feltétlenül felelnek meg. Ennek következtében nem hordoznak további meteorológiai jelet, csak zajt.
Abban az esetben, amikor az előrejelzés első óráit vizsgáljuk, az inicalizáció segítségével teremthető meg a kezdeti mezők egyensúlya.
Az inicializáció lehet statikus vagy dinamikus. Statikus esetben a nagyfrekvenciás rezgések kezdeti amplitúdójára és annak tendenciájára szabunk ki feltételt (pl. legyen nulla, [24]). Dinamikai inicializációnál a nagyfrekvenciás rezgések időbeli integrálások során szűnnek meg. Ennek oka lehet a szelektív csillapítás (pl. spin-up inicializiáció19, [7, 189. oldal]) vagy egy digitális szűrő használata (digitális szűrő inicializáció).
Tehát a dinamikai inicializáció egyik típusa a digitális szűrő inicializáció20, melynek során a meteorológiai mezőkből időbeli Fourier sorokat állítunk elő, majd ezekből levágjuk a nagyfrekvenciás hullámokat. [7, 195. oldal]
Az adott meteorológiai mező ( ) időbeli integrálását
) időbeli integrálását  és
és  között végezve minden időlépésre kapunk egy értéket (
között végezve minden időlépésre kapunk egy értéket ( ), melyek súlyozott átlaga adja a kívánt kezdeti értéket:
), melyek súlyozott átlaga adja a kívánt kezdeti értéket:
A súlyokat ( ) oly módon választjuk meg, hogy a
nagyfrekvenciás módusok amplitúdója minimális legyen. Különböző szűrőknél különböző súlyokat alkalmazunk.
) oly módon választjuk meg, hogy a
nagyfrekvenciás módusok amplitúdója minimális legyen. Különböző szűrőknél különböző súlyokat alkalmazunk.
Adott  időlépcső és
időlépcső és  frekvencia esetében az ún. digitális frekvencia [24]:
frekvencia esetében az ún. digitális frekvencia [24]:
Ahol  az adott frekvenciához tartozó
periódusidő. A nagyfrekvenciás rezgések digitális frekvenciája
az adott frekvenciához tartozó
periódusidő. A nagyfrekvenciás rezgések digitális frekvenciája  és
és  közé esik. A
-hez tartozó periódusidőt (
közé esik. A
-hez tartozó periódusidőt ( ) levágási periódusidőnek nevezzük.
) levágási periódusidőnek nevezzük.
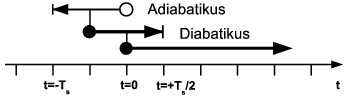
A szűrés megvalósítása többféleképpen lehetséges. Lynch 1997-ben [25] az rán szemléltetett módszert javasolta:
Ennek során két integrálással jutunk a szűrt állapothoz, mindkétszer használva a szűrőt. Először
 és
és  között egy időben visszafele történő száraz adiabatikus integrálással egy
között egy időben visszafele történő száraz adiabatikus integrálással egy  időpontra vonatkozó szűrt mezőhöz jutunk. Ebből kiindulva
időpontra vonatkozó szűrt mezőhöz jutunk. Ebből kiindulva
 -ig integrálva - diabatikusan, a modell teljes fizikáját használva - adódik
a végleges szűrt mező a időpontra, amiből az
előrejelzést indíthatjuk.
-ig integrálva - diabatikusan, a modell teljes fizikáját használva - adódik
a végleges szűrt mező a időpontra, amiből az
előrejelzést indíthatjuk.
Munkám során mindkét modell inicializálásánál ezt a sémát alkalmaztam: a WRF-nél ,,Twice DFI", a CHAPEAU-nál ,,Backward+Forward DFI" néven hivatkoznak rá (4. táblázat). A további inicializációs beállításokat a későbbiekben ismertetem.
Az inicializációról bővebb leírás található Csigó István diplomamunkájában [24], Lynch és Huang cikkeiben ([25], [26], [27]), valamint Kalnay könyvében [7].
A modellekben megjelenő zajokat különböző zaj paraméterekkel mutathatjuk ki. Az inicializált és az inicializálatlan futások adataiból számolt paraméterek összevetésével pedig az inicializáció hatékonysága szemléltethető.
Lynch és Huang [26] a következő paramétert használták:
 |
(1) |
Ahol  ,
, a rácsszám x illetve y irányban,
a rácsszám x illetve y irányban,  ,
,
 az adott rácscella indexe,
az adott rácscella indexe,
 pedig a felszíni légnyomás.
pedig a felszíni légnyomás.
Tehát a felszíni légnyomás tendencia abszolútértékét kiátlagolták az egész tartományra. Ezt a
mennyiséget a modellfutás első hat órájára kiszámolták és ábrázolták. Ehhez hasonlóan jártam el én is,
azzal a különbséggel, hogy a tengerszinti légnyomástendenciát használtam ( ).
).
Ha felszíni légnyomás menete zajos, vannak benne nagyfrekvenciás módusok, akkor a fenti paraméter értéke nagy lesz, ezért jellemezhetjük a zajt
 -el.
-el.
Lynch egy későbbi cikkében [25] egy általánosabb zaj paramétert alkalmazott:
 |
(2) |
Ahol
,
,
,
jelentése hasonló, mint
esetében,
 a vertikális szintek száma,
a vertikális szintek száma,
 az aktuális vertikális szint indexe,
az aktuális vertikális szint indexe,
 pedig a horizontális
sebesség-vektor.
pedig a horizontális
sebesség-vektor.
 a horizontális divergencia területi átlaga (
a horizontális divergencia területi átlaga (  ). Mivel ez a mennyiség az egész modellrácsra vonatkozik,
jobban jellemzi a zajt, mint a korábban ismertetett paraméter.
). Mivel ez a mennyiség az egész modellrácsra vonatkozik,
jobban jellemzi a zajt, mint a korábban ismertetett paraméter.